이번 프로젝트는 라즈베리파이에서 초음파 센서, 부저, 버튼을 이용하여 시각 장애인을 위한 충돌 위험 신호 시스템을 개발하는 프로젝트 입니다.
구현조건
- 버튼을 누르면 초음파 센서가 센서 전방에 놓인 사물까지의 거리를 측정한다.
- 측정된 거리에 따라 소리가 발생하는 주기와 주파수를 달리하여, 사물까지의 거리를 소리 신호로 전달한다.
- 사물까지의 거리가 멀면 긴 주기 (2초)와 낮은 주파수 (131Hz)로 소리를 발생시킨다.
- 반면, 사물까지의 거리가 가까우면 짧은 주기 (0.1초)와 낮은 주파수 (1,046Hz)로 소리를 발생시킨다.
- 버튼을 다시 누르면 초음파 센서가 측정을 멈춘다.
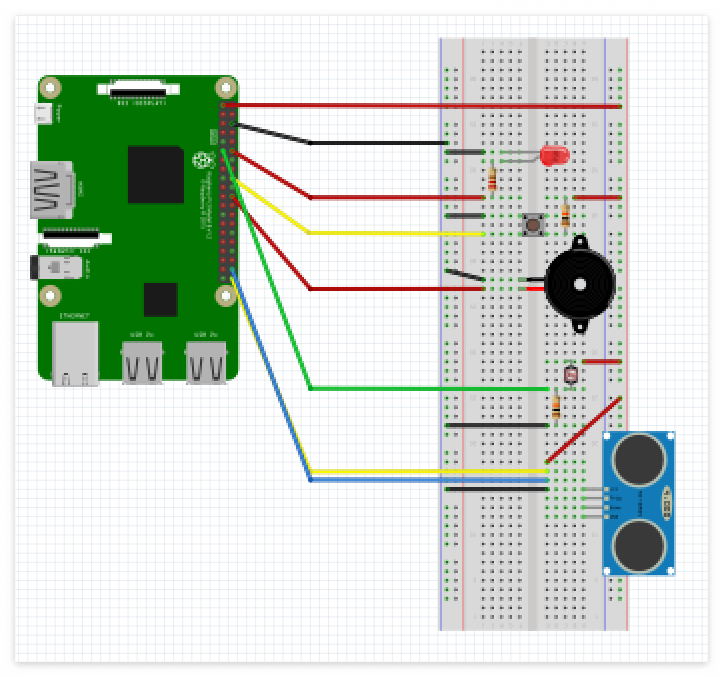
회로도
- LED : GPIO16(12)
- Photo resistor : GPIO17(11)
- Switch : GPIO24(18)
- Buzzer : GPIO25(22)
- HC - SR04 : Trig -> GPIO21(40) / Echo -> GPIO20(38)
DetectionSystem.c 파일을 만들어 코드를 작성해보겠습니다.
#include <wiringPi.h>
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <unistd.h>
#include <sys/types.h>
#include <softTone.h>
#define SPKR 6 // GPIO25
#define Button 5 // GPIO24
int TRIG = 29; //gpio 21 pin 40
int ECHO = 28; //gpio 20 pin 38
static int Echo_Test()
{
unsigned long TX_time = 0;
unsigned long RX_time = 0;
float distance = 0;
unsigned long timeout = 50000000; // 0.5 sec ~ 171 m 50*10^6 us
unsigned long Wait_time=micros();
pinMode(TRIG, OUTPUT); //gpio 21 pin 40 using trigger
pinMode(ECHO, INPUT); //gpio 20 pin 38 using Echo ultra sound
// Ensure trigger is low.
digitalWrite(TRIG, LOW);
delay(50); //mili sec
// Trigger tx sound.
digitalWrite(TRIG, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG, LOW);
// Wait for tx response, or timeout.
while ((digitalRead(ECHO) == LOW && (micros()-Wait_time) < timeout))
{
if(digitalRead(ECHO) == HIGH) break;
}
// Cancel on timeout.
if ((micros()-Wait_time) > timeout)
{
printf("0 Out of range.micros =%d wait-time=%d \n",micros(),Wait_time);
//return 0;
}
TX_time = micros(); //since call wiringPiSetup, the number of microseconds
// Wait for rx sound response, or timeout.
while ((digitalRead(ECHO) == HIGH && (micros()-Wait_time)) < timeout)
{
if(digitalRead(ECHO) == LOW) break;
}
// Cancel on timeout.
if ((micros()-Wait_time) > timeout)
{
printf("1.Out of range.\n");
//return 0;
}
RX_time = micros();
// Calculate rx-tx duration to change distance.
distance = (float) (RX_time - TX_time) * 0.017; //( 340m/2) *100cm/10^6 us
printf("Range %.2f cm.\n", distance);
softToneCreate(SPKR);
if(distance >= 50)
{
softToneWrite(SPKR, 1046);
delay(200);
}
else if(distance < 50)
{
softToneWrite(SPKR, 131);
delay(10);
}
return 1;
}
int switchControl( )
{
int cnt =0;
pinMode(Button, INPUT);
if(digitalRead(Button) == LOW)
{
Echo_Test();
delay(500);
}
return 0;
}
int main()
{
printf (" HC-SR04 Ultra-sonic distance measure program \n");
if (wiringPiSetup () == -1) {
exit(EXIT_FAILURE);
}
if (setuid(getuid()) < 0) {
perror("Dropping privileges failed.\n");
exit(EXIT_FAILURE);
}
for(;;)
{
switchControl();
}
return 0;
}
코드를 작성하였다면 gcc를 이용해 컴파일하고 실행시켜보겠습니다.
pi@raspberrypi:~ $ gcc -o DetectionSystem DetectionSystem.c -lwiringPi
pi@raspberrypi:~ $ sudo ./DetectionSystem
위의 명령어를 통해 프로그램을 실행 시킬 수 있습니다.
'Project > Embedded Project' 카테고리의 다른 글
| 기억력 도전 게임 프로젝트 (2) | 2023.12.22 |
|---|
